

درایو چیست؟
درایو فرکانس متغیر (Variable Frequency Drive) یا به اختصار VFD تجهیز الکترونیکی است که فرکانس، سرعت، گشتاور، موقعیت و سایر مولفههای موتورهای القایی AC را کنترل میکند. در مقاله اتوماسیون صنعتی به بررسی سلسله مراتب و بخشهای تشکیلدهنده سیستمهای اتوماسیون صنعتی از جمله درایوهای فرکانس متغیر VFD پرداختیم. محور اصلی این مقاله بررسی نحوه عملکرد و نحوه استفاده از درایو فرکانس متغیر و نیز تاریخچه کنترلکنندههای موتورهای القایی میباشد.

کنترل سرعت موتورهای الکتریکی مورد استفاده در صنعت همواره یکی از چالشهای پیشروی صنعتگران بوده و هست. تقریباً هر فرآیندی که در آن از الکتروموتورها استفاده میشود، از کنترل سرعت نیز بهره میبرد. استفاده از VFDها همانطور که روز به روز در صنعت افزایش یافته است، اهمیت بحث سیوینگ انرژی و صرفهجویی هم در بسیاری از موارد (بهخصوص پمپها و فنها) مورد توجه قرار گرفته است که در مقالات بعدی به آنها خواهیم پرداخت.

کنترل سرعت قبل از VFD
قبل از ظهور VFDها، سرعت موتورها از طرق مختلف کنترل میشدند. برای مثال در گذشته، سرعت موتورهای DC با کنترل جریان میدان و با استفاده از مقاومتها کنترل میشد و یا در بعضی مواقع از موتورهای دیگر تحت عنوان دالاندر یا دو سرعته استفاده میشد.
با این حال، هنگامی که تریستورها بهعنوان اولین نیمههادیهای قدرت در دهه 1950 در دسترس قرار گرفتند، کنترل ولتاژ آرمیچر و در نتیجه کنترل سرعت موتور DC با استفاده از Phase Controlها امکانپذیر شد. هم اکنون نیز این مدل از درایوهای DC به تعداد محدودی تولید و مورد استفاده قرار میگیرند.
با این وجود از یک زمانی به بعد دیگر استفاده از موتورهای DC توجیه اقتصادی و فنی نداشت و موتورهای AC گوی سبقت را از موتورهای DC ربودند و جایگزین آنها شدند. در حالی که موتورهای DC معمولاً دارای دو سیمپیچ (میدان و آرمیچر) و همچنین جاروبک و کموتاتور هستند، موتور AC دارای سیمپیچ ثابت (استاتور) و روتور است. روتور معمولاً از رساناهایی تشکیل شده است که با ریختهگری آلومینیوم یا مس در هسته آهن تشکیل میشوند و در موتورهای AC از جاروبک و کموتاتوری استفاده نمیشود. بنابراین الکتروموتور AC ارزانتر، سادهتر با استهلاک کمتر و قابلاطمینانتر است. از اینرو تعجبآور نیست که بالای 90 درصد موتورهای حال حاضر صنعت جهان از نوع موتورهای AC هستند.
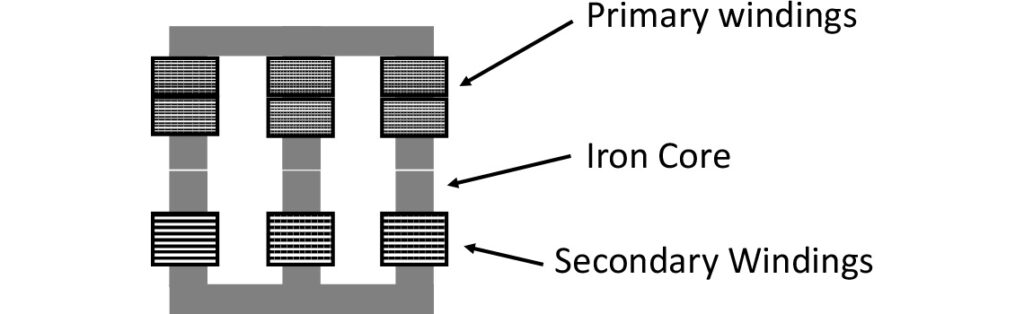
اگر سیم پیچ ترانسفورماتور به منبع تغذیه سه فاز متصل شود، جریان سینوسی در سیم پیچ های طرف اولیه ایجاد شده و این جریان باعث ایجاد شار مغناطیسی در هسته آهنی ترانس می شود که بسته به ولتاژ متناوب اعمال شده (و همچنین جریان) معمولا در 50 یا 60 هرتز بسته به سیستم قدرت، افزایش و کاهش می یابد.
شار مغناطیسی متغیر باعث القا ولتاژ در سیم پیچ های ثانویه می شود و اگر بار به آن متصل شود (یا حتی اگر سیم پیچ ها با هم اتصال کوتاه شوند) جریان الکتریکی جاری می شود. نسبت دورهای سیم پیچ اولیه و ثانویه، نسبت ولتاژ اولیه و ولتاژ ثانویه را تعیین می کنند.
حال تصور کنید که سیم پیچ ها را بپیچانیم و یک فاصله هوایی کوچک بین آنها ایجاد کنیم و اجازه دهیم سیم پیچ ثانویه، که اکنون روتور نامیده می شود، آزادانه حرکت کند. این همان اساس کار موتور القایی است که در شکل زیر نشان داده شده است.
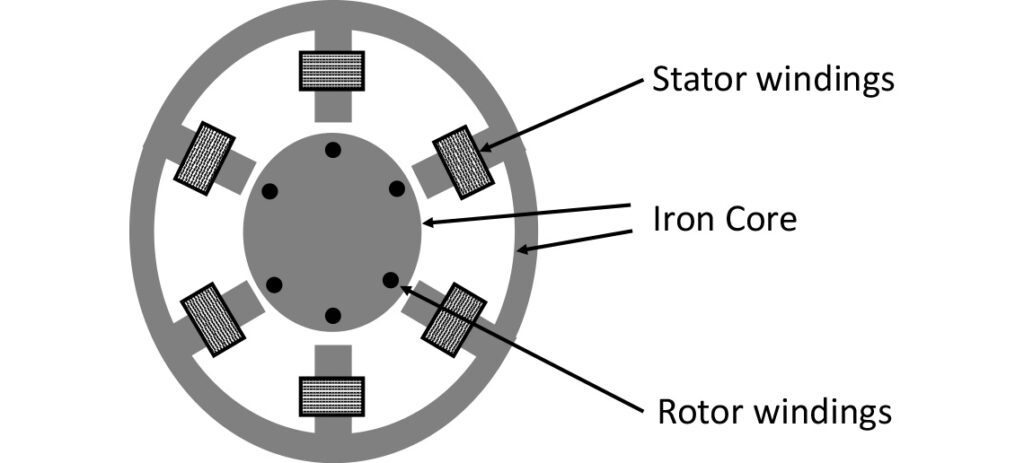
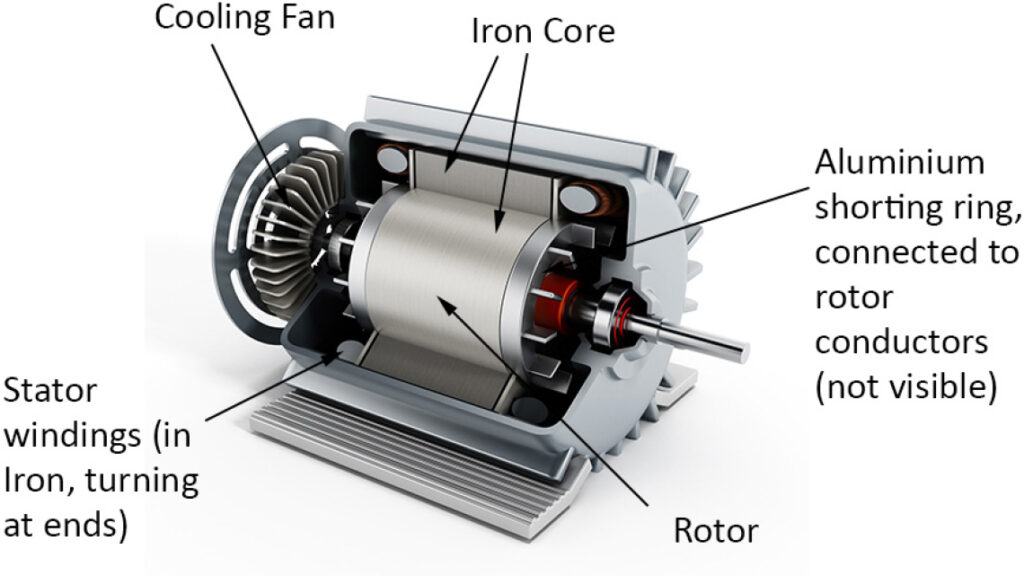
بنابراین هنگامی که ما یک منبع تغذیه سه فاز را به سیم پیچ اولیه متصل می کنیم) که اکنون استاتور نامیده می شود( عملکرد ترانسفورماتور مانند قبل است و جریان در سیم پیچ های ثانویه یا همان روتور جریان می یابد. همانطور که در بالا ذکر شد، روتور معمولاً از هادی های ریخته گری شده درون یک هسته آهنی تشکیل شده است که در هر انتهای آن یک حلقه اتصال وجود دارد. از آنجا که این آرایش کمی شبیه قفس سنجاب به نظر می رسد، گاهی اوقات از این موتور های AC به عنوان موتور قفس سنجابی یاد می شود.
در زمانی که یک میدان مغناطیسی و یک جریان الکتریکی داشته باشیم، نیرویی به وجود می آید که طبق قانون دست چپ باعث چرخش روتور می شود. که در واقع اساس کار موتور های القایی همین نیرو است.
با این حال، موتور با شتاب گرفتن، شروع به دریافت میدان مغناطیسی می کند که به
طور پیوسته و متناوب در اطراف استاتور با فرکانس منبع سه
فاز در حال چرخش است. ما فقط تا زمانی که میدان مغناطیسی به طور مداوم تغییر کند عمل
ترانس را خواهیم داشت. ترانسفورماتورها فقط با AC کار
می کنند. بنابراین بدون ولتاژ AC، دیگر هیچ میدان مغناطیسی در حال تغییر
نیست و به تبع آن، جریان روتور و گشتاور هم وجود نخواهد داشت.
به بیان دیگر روتورکه دارای سیم پیچ هایی است، میدان مغناطیسی چرخشی تولید شده
توسط سیم پیچ های استاتور را قطع می کند.
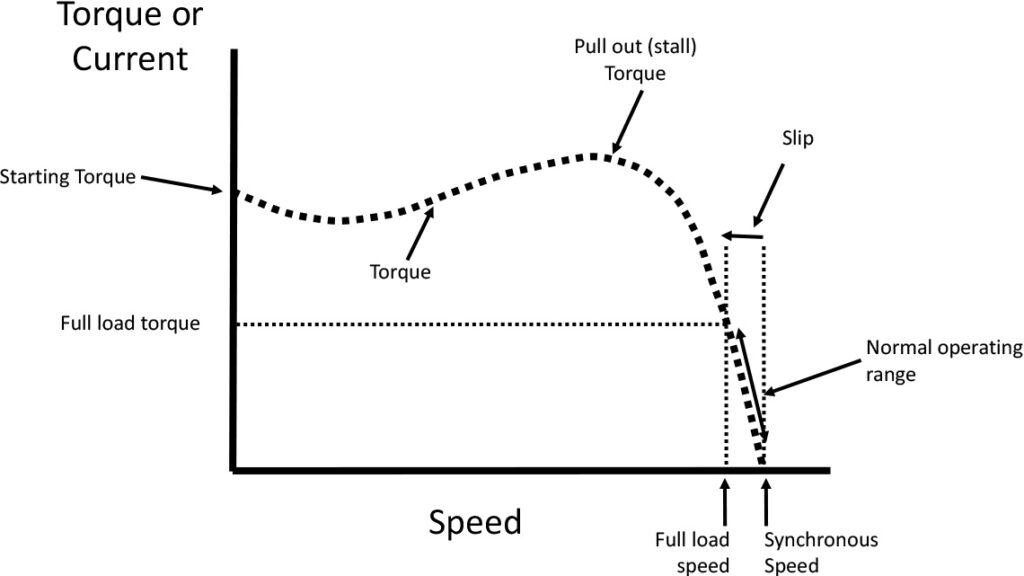
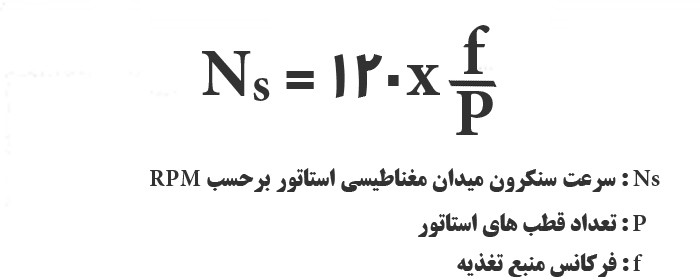
یک موتور القایی استاندارد همیشه کمی کندتر از فرکانس اعمال شده کار می کند. این کاهش سرعت به عنوان لغزش شناخته می شود. با بارگیری موتور القایی، این لغزش کمی افزایش می یابد، و جریان بیشتری هم کشیده می شود. بنابراین سرعت موتور اساساً به فرکانس اعمال شده بستگی دارد. در یک موتور القایی، این سرعت به طور معمول چند درصد کمتر از سرعت سنکرون (که در آن گشتاوری وجود ندارد) است. میزان فاصله روتور از میدان مغناطیسی چرخان به عنوان لغزش موتور شناخته می شود. هرچه لغزش بیشتر باشد (بین 0 و 1)، گشتاور بیشتری توسط موتور تولید می شود.
دو برابر شدن تعداد سیم پیچ ها یا جفت های قطب ها اجازه می دهد تا این سرعت کاهش یابد. یک موتور با یک جفت قطب (یک موتور دو قطبی) که با یک منبع تغذیه 50 (60) هرتز کار می کند با سرعت 48 (58) دور در ثانیه یا 2880 (3480) دور در دقیقه کار خواهد کرد. همچنین یک موتور چهار قطبی، در دور موتور 1440 (1740) بر دقیقه کار می کند و همچنین موتور های شش و هشت و… قطب که با توجه به نیاز مصرف کننده و برخی کاربرد های تخصصی تر، طراحی و ساخته می شود.
شکل زیر رابطه گشتاور/ سرعت کلاسیک موتور القایی AC را نشان می دهد.
بنابراین با توجه به توضیحات فوق اگر بخواهیم دور موتور را کنترل کنیم یا باید تعداد قطب ها را تغییر دهیم ( که این امر منطقی نیست) یا باید فرکانس اعمال شده را تغییر دهیم. پس، اگر ما موفق به تغییر فرکانس شویم، باید از ولتاژ نیز حفاظت کنیم، زیرا جریان مغناطیسی در استاتور به انتگرال ولتاژ در طول زمان بستگی دارد. یعنی ناحیه زیر منحنی موج سینوسی. اگر فرکانس را کاهش دهیم، دوره تناوب یا طول موج سینوسی افزایش می یابد ، بنابراین سطح زیر آن نیز افزایش می یابد و منجر به جریان مغناطیسی بیش از حد در موتور می شود. بنابراین اگر فرکانس را کاهش دهیم باید ولتاژ وارد شده به موتور را نیز متناسب با آن کاهش دهیم.
بنابراین برای کنترل سرعت موتور، باید فرکانس آن را تغییر دهیم و همچنین ولتاژ اعمال شده را کنترل کنیم تا شار بهینه یا میدان مغناطیسی را نیز حفظ کنیم. به بیان دیگر سرعت چرخش میدان مغناطیسی به تعداد قطب ها یا سیم پیچ های توزیع شده در اطراف استاتور و فرکانس جریان تغذیه بستگی دارد. به این سرعت، سرعت سنکرون گفته می شود.
تقریباً اکثر درایو های فرکانس متغیر موجود در صنعت بر اساس تغذیه AC و تبدیل آن به DC با استفاده از یکسوسازها و سپس با استفاده از بخش اینورتر در درایو آن را به منبع ولتاژ با فرکانس متغیر تبدیل می کنند. اینورتر قسمت اصلی هر VFD است، به همین دلیل درایو فرکانس متغیر را اصطلاحا اینورتر نیز می نامند.
اینورترها و تا حدودی یکسوسازها تا حد زیادی به نیمه هادی های قدرت مدرن متکی هستند که می توانند ولتاژ و جریان های بالا را تغییر داده و هدایت کنند. همچنین برای کنترل و فعال سازی آنها به ریز پردازنده های قدرتمندی نیاز است. این قطعات در حدود سی سال گذشته با هزینه و اطمینان قابل قبولی در دسترس بوده اند. در سال های اخیر، همواره درایوهای AC یک محصول صنعتی نسبتاً مدرن به حساب آمده اند.
حال سوالی که مطرح می شود آن است که اساس کار VFD ها چیست؟ برای پاسخ به این سوال ایتدا باید به سراغ واحدهای یکسو کننده برویم. شکل زیر یک یکسوساز سه فاز را نشان می دهد که از شش دیود متصل به یک خازن و یک مقاومت به عنوان یک بار ساده استفاده شده است.
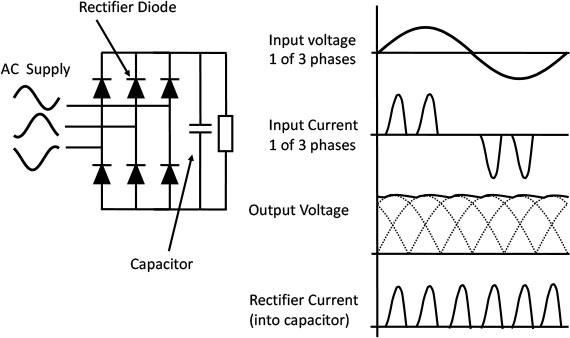
اولین مرحله درایو AC با فرکانس متغیر یا VFD ، مبدل AC-DC است. مبدل از شش دیود تشکیل شده است که مشابه شیرهای یک طرفه در سیستم های لوله کشی هستند. آنها اجازه می دهند تا جریان فقط در یک جهت عبور کند (جهت نشان داده شده توسط فلش در نماد دیود).
به عنوان مثال هنگامی که ولتاژ فاز A (در واقع ولتاژ را مشابه با فشار آب در سیستمهای لوله کشی در نظر می گیریم) مثبت تر از ولتاژ فازهای B یا C است، آنگاه دیود آن باز شده و جریان عبور می کند. هنگامیکه فاز B مثبت تر از فاز A شود سپس دیود فاز B باز خواهد شد و فاز A بسته میشود.
این موضوع برای دیودهایی که در بخش منفی باس نیز قرار دارند صدق می کند. بنابراین، با باز و بسته شدن هر دیود، شش “پالس” خواهیم داشت و به بیان دیگر این درایو، “VFD شش پالس” نامیده می شود، که ترکیب استاندارد برای اینورتر (VFD) جریان است.
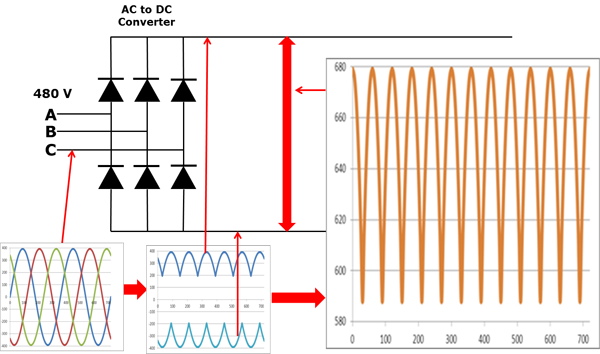
اگر فرض کنیم اینورتر (VFD) در یک سیستم قدرت 480 ولت کار می کند. 480V ولتاژ موثر(rms) می باشد. بنابراین در این سیستم 480 ولتی، حداکثر ولتاژ 680 ولت است. همانطور که در شکل زیر مشاهده می کنید، در این اینورتر باس DC ، دارای ولتاژ DC با ریپل AC است و ولتاژ بین V580 و V680 در نوسان است.
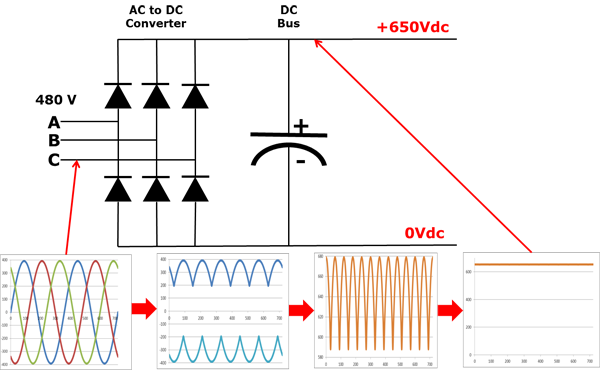
ما می توانیم با افزودن یک خازن بر روی باس DC از ریپل مزاحم AC خلاص شویم. در این جا خازن مشابه یک مخزن در سیستم لوله کشی کار می کند. این خازن ریپل AC را جذب کرده و ولتاژ مستقیم DC را تحویل می دهد.مقدار ریپل AC در باس DC معمولاً کمتر از 3 ولت است. بنابراین، ولتاژ در باس DC حدود 677 ولت است.
ولتاژ واقعی و تغییرات آن به عواملی مانند سطح ولتاژ خط AC منبع تغذیه درایو (ولتاژ اصلی) ، سطح ولتاژ یا عدم تعادل ولتاژ در سیستم قدرت سه فاز، بار موتور، امپدانس سیستم قدرت و مشخصات چوک ورودی یا چوک خروجی و… بستگی دارد. در کل همه این موارد تأثیر مستقیمی بر ولتاژ باس dc دارند.
مبدل پل دیود که در ابتدای مدار، AC را به DC تبدیل می کند، گاهی اوقات فقط به عنوان کانورتر شناخته می شود و مبدلی که DC را به AC تبدیل می کند نیز کانورتر است، اما برای تمایز آن از مبدل پل دیود ابتدای مدار، معمولاً از آن به عنوان “اینورتر” یاد می شود و در صنعت متداول است که از مبدل DC به AC با عنوان اینورتر یاد می شود.
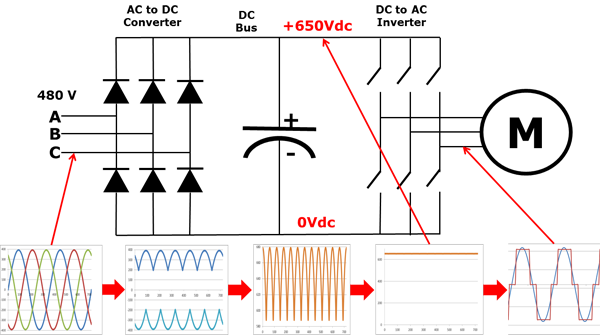
توجه داشته باشید که در VFDها ، سوئیچ های نشان داده شده در واقع ترانزیستور (IGBT) هستند.
وقتی یکی از کلیدهای بالایی اینورتر را می بندیم، آن فاز موتور به مثبت باس dc متصل می شود و ولتاژ مثبت بر روی آن فاز می افتد و به همین ترتیب اگر یکی از کلیدهای پایینی اینورتر را ببندیم، آن فاز به منفی باس dc متصل می شود و ولتاژ منفی روی آن فاز ایجاد می شود. بنابراین، ما می توانیم هر فاز روی موتور را به میل خود مثبت یا منفی کنیم و بنابراین می توانیم هر فرکانسی را که می خواهیم تولید کنیم. در نتیجه، می توانیم هر مرحله را مثبت، منفی یا صفر کنیم.
موج سینوسی آبی فقط برای هدف آموزشی نشان داده شده است. درایو این موج سینوسی را تولید نمی کند.
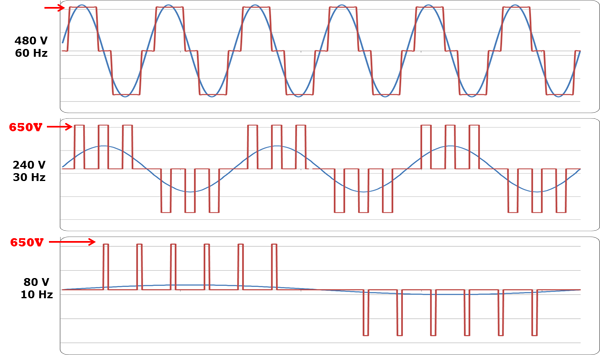
توجه داشته باشید که خروجی VFD یک شکل موج “مستطیلی” یا به عبارتی PWM است و VFD خروجی سینوسی تولید نمی کند. این شکل موج مستطیل شکل برای سیستم توزیع توان به هیچ وجه مناسب نیست اما برای موتور کاملاً مناسب است (به دلیل خاصیت سلفی موتور این موج PWM تا حدودی به سینوسی دندانه دار نزدیک می شود اما با این وجود تا سینوسی کامل فاصله دارد.) به بیان ساده، کنترل مدت زمان خاموش و روشن بودن، مدولاسیون عرض پالس یا همان PWM نامیده می شود.
اگر فرکانس سویچینگIGBT های خود (یا به عبارتی همان فرکانس کریر) را چندین هزار بار در ثانیه تغییر دهیم (معمولاً بین 4 تا 16 کیلوهرتز بسته به توان نامی و شرایط محیط نصب درایو) می توانیم شکل موج سینوسی نسبتا مطلوبی ایجاد کنیم.
در مقالات بعدی به بررسی کامل فرکانس کریر و اثرات افزایش و کاهش آن خواهیم پرداخت.
لازم به ذکر است که میتوان با نصب چوک خروجی و فیلترهای سینوسی در خروجی درایو، شکل موج را تا حدود 90 درصد بهبود بخشید و به سینوسی کامل نزدیک نمود.
توجه داشته باشید که در نیمی از زمان یک سیکل در خروجی درایو ولتاژ داریم و در نیم سیکل دیگر ولتاژ نخواهیم داشت. بنابراین، ولتاژ خروجی متوسط برابر با 240 ولت یا همان نصف ولتاژ باس تغذیه 480 ولت است. بنابراین با کنترل پالس های خروجی درایو می توانیم ولتاژ متوسط مورد نظر را در خروجی درایو داشته باشیم.
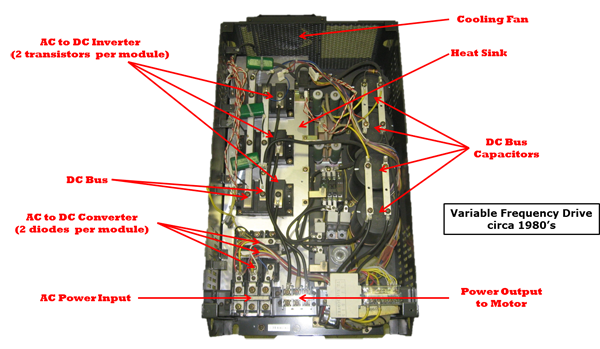
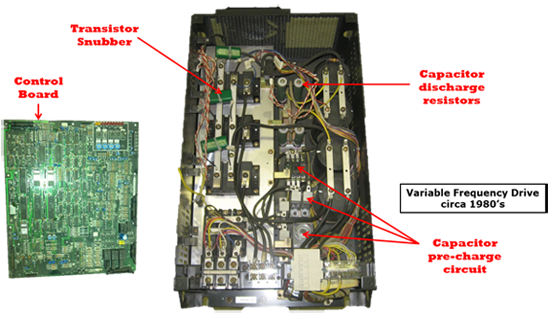
شکل زیر ساختار داخلی و بخش های مختلف اینورتر (VFD) را نمایش می دهد.
در مقالات بعدی به بررسی جزییات بیشتری از درایو، مدار داخلی، معایب و مزایای درایوها و بحث سیوینگ انرژی خواهیم پرداخت.
امیدواریم از این مقاله بهره کافی را برده باشید.


{kind=link}
بدون دیدگاه